

Business Growth
Networking

IT Solution
Cloud Service

Save Security
Cloud Service

Platform Integar
Security

Cyber Security
Security
Techno Service
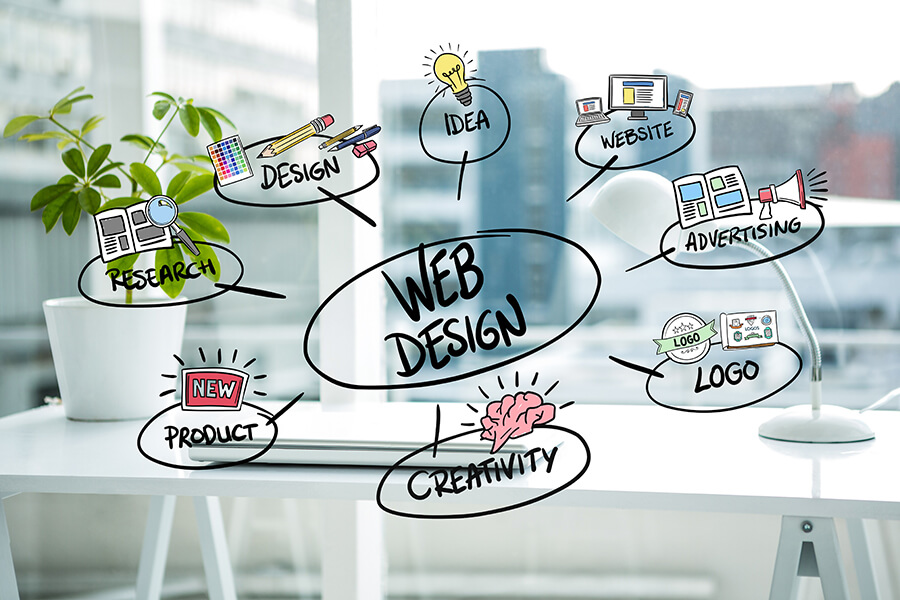
Web Design
There are many variations of passages of Lorem Ipsum available but the major alteration in some form .

Alex Gorsky
Web Developer
There are many variations of passages of Lorem Ipsum available but the major alteration in some form .

Tamara McGahey
Web Developer
There are many variations of passages of Lorem Ipsum available but the major alteration in some form .

Kenneth Williams
Web Developer
There are many variations of passages of Lorem Ipsum available but the major alteration in some form .
Tamara McGahey
Web Developer

